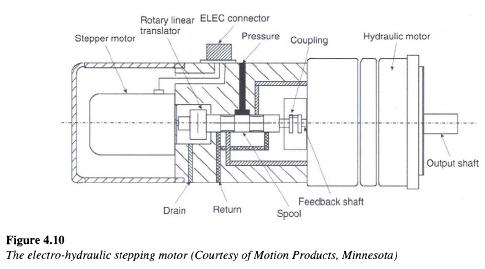
An electro-hydraulic stepper motor (EHSM) is a device, which uses a small electrical stepper motor to control the huge power available from a hydraulic motor (Figure 4.10).
It consists of three components:
1. Electrical stepper motor
2. Hydraulic servo valve
3. Hydraulic motor.
These three independent components when integrated in a particular fashion provide a higher torque output, which is several hundred times greater than that of an electrical stepper motor.
The electric stepper motor undergoes a precise, fixed amount of rotation for each electrical pulse received. This motor is directly coupled to the rotary liner translator of the servo valve. The output torque of the electric motor must be capable of overcoming the flow forces in the servo valve. The flow forces in the servo valve are directly proportional to the rate of flow through the valve. The torque required to operate the rotary linear translator against this axial force is dependent on the flow gain in the servo valve.
The hydraulic motor is the most important component of the EHSM system. The performance characteristics of the hydraulic motor determine the performance of the EHSM. These are typically used for precision control of position and speed. These motors are available with displacements ranging from 0.4 cubic in. (6.5 cm3) to 7 cubic in. (roughly 115 cm3). Their horsepower capabilities range between 3.5 hp (2.6 kW) and 35 hp (26 kW). Typical applications include textile drives, paper mills, roll feeds, automatic storage systems, machine tools, conveyor drives, hoists and elevators.