Piston type motors can be in-line-axis or bent-axis types.
(1) In-Line-Axis, Piston-Type Motors. These motors (Figure 4-15) are almost identical to the pumps. They are built-in, fixed- and variable-displacement models in several sizes. Torque is developed by a pressure drop through a motor. Pressure exerts a force on the ends of the pistons, which is translated into shaft rotation. Shaft rotation of most models can be reversed anytime by reversing the flow direction.

Oil from a pump is forced into the cylinder bores through a motor’s inlet port. Force on the pistons at this point pushes them against a swash plate. They can move only by sliding along a swash plate to a point further away from a cylinder’s barrel, which causes it to rotate. The barrel is then splined to a shaft so that it must turn.
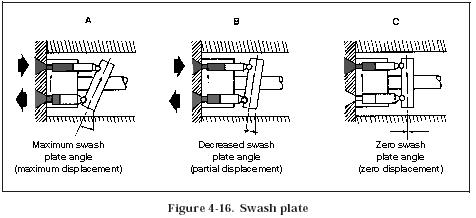
A motor’s displacement depends on the angle of a swash plate (Figure 4-16). At maximum angle, displacement is at its highest because the pistons travel at maximum length. When the angle is reduced, piston travel shortens, reducing displacement. If flow remains constant, a motor runs faster, but torque is decreased. Torque is greatest at maximum displacement because the component of piston force parallel to a swash plate is greatest.
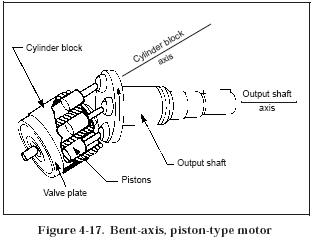
(2) Bent-Axis, Piston-Type Motors. These motors are almost identical to the pumps. They are available in fixed- and variable-displacement models (Figure 4-17), in several sizes. Variable-displacement motors can be controlled mechanically or by pressure compensation. These motors operate similarly to in-line motors except that piston thrust is against a drive-shaft flange. A parallel component of thrust causes a flange to turn. Torque is maximum at maximum displacement; speed is at a minimum. This design piston motor is very heavy and bulky, particularly the variable- displacement motor. Using these motors on mobile equipment is limited.
Although some piston type motors are controlled by directional-control valves, they are often used in combination with variable-displacement pumps. This pump-motor combination (hydraulic transmission) is used to provide a transfer of power between a driving element, such as an electric motor, and a driven element. Hydraulic transmissions may be used for applications such as a speed reducer, variable speed drive, constant speed or constant torque drive, and torque converter. Some advantages a hydraulic transmission has over a mechanical transmission is that it has—
• Quick, easy speed adjustment over a wide range while the power source is operating at constant (most efficient) speed.
• Rapid, smooth acceleration or deceleration.
• Control over maximum torque and power.
• A cushioning effect to reduce shock loads.
• A smooth reversal of motion.